利用VRT技術實現高速度和高精度,同時保持設計靈活性
振動問題是機器人控製技術麵臨的挑戰之一。振動幅度與機器人的運動速度成正比,並且會對支撐底座和周圍設備產生不利影響。同時,製造商需要機器人以更快的速度動作,以縮短生產線完成每道工序的時間。
愛普生開發的VRT技術(Vibration Reduction Technology)能最大限度發揮愛普生機器人的性能。VRT通過控製機器人的動作方式來降低支撐底座、末端執行器、相機和其他部件的振動幅度。VRT還可以最大限度地減少機器人運動引起的振動,降低係統設計成本,提高設計靈活性。
提高機器人速度麵臨的挑戰
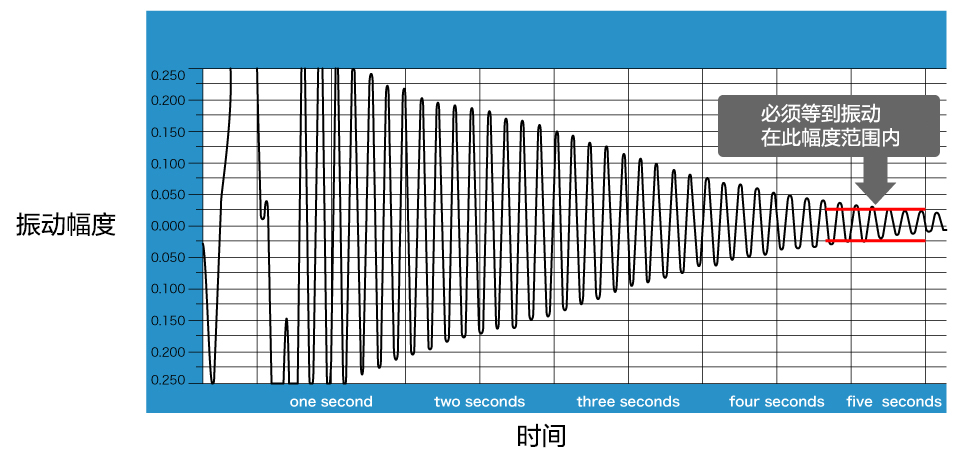
製造商希望在保證產品質量的前提下縮短每道工序的時間,進而提高產能。這就需要高速度和高加速度動作的機器人。然而,機器人運動得越快,產生的振動就越大,停止後餘振也會越大。不僅機器人本身會振動,用於固定機器人的支撐底座以及安裝在機器人上的任何傳感器、相機和其他器件也會振動。
即使機器人本身的餘振很小,支撐基座中的大量餘振也會使機器人難以高速運行或進行高精度定位。而如果機器人必須等到餘振消失才能維持精度,則完成每道工序所需的時間就會增加。傳感器和相機的振動也會增加檢測數據出錯的概率,導致產品質量不佳。
製造商真正需要的技術是在保持機器人高速運轉的同時減少機器人和外圍設備的振動,從而最大限度地提高整個製造係統的性能。
減少振動的方法及相關問題
減少機器人振動和提高機器人精度通常采用如下方法。
• 以低速和低加速度移動機器人。
• 增加手臂的剛度,減輕有效載荷的重量。
• 增加支撐底座的剛度,並將機器人緊緊地固定在支撐底座上。
• 使用緩衝材料防止振動延伸到周圍
減緩機器人的運動速度將減少振動,但無法縮短循環時間。增加機械臂和支撐底座的剛度也會引發一係列問題,如增加成本,限製了機器人的安裝位置等。
如果機器人是懸掛在框架上的,通常使用高剛性的焊接鐵支撐底座將振動降低到可接受的水平。然而,製作帶有鐵架的焊接支撐底座需要時間和成本,且其高度不可調,無法輕易進行改裝。帶有鋁架的鋁質支撐底座容易製作,但鋁缺乏剛性,會導致支架不穩定,需要時間來穩定機器人操作過程中產生的殘餘振動。最後一種方法是使用緩衝材料,但在空間利用效率方麵並不太理想。
引入VRT的優勢
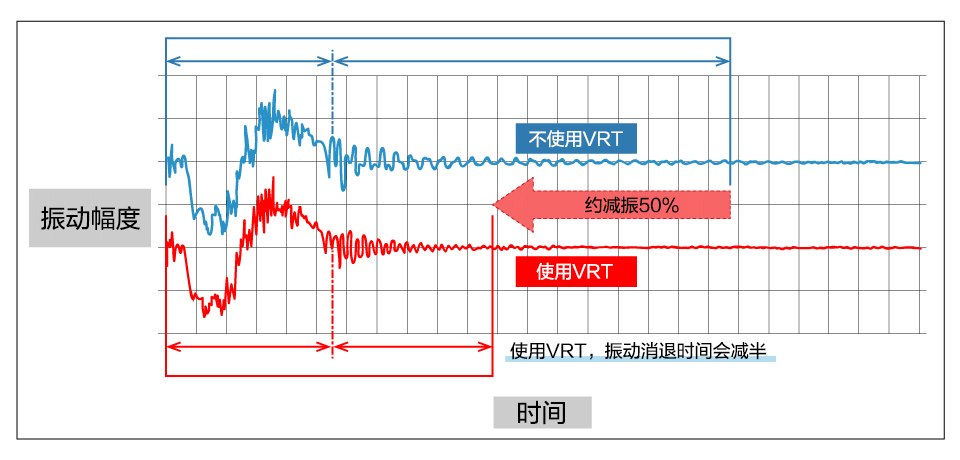
VRT根據支撐底座、末端執行器、相機和其他部件的特性來控製機器人的動作方式,從而降低這些部件的振動幅度。當振動幅度較大的機器人懸掛安裝在框架上時,這項技術尤為有效,振動幅度有可能降低約90%。
VRT的優勢
• 減少機器人振動並實現快速、準確的動作
• 顯著縮短等待殘餘振動消退的時間,有助於縮短周期時間
• 通過減少包括支撐底座在內的所有設備的振動來提高生產率,同時降低成本
• 提高機器人安裝和係統設計的自由度,同時無需在支撐底座設計上花費額外時間和成本。
VRT可節省空間並實現高速度和高精度,最大限度地提高了愛普生機器人的性能,並有助於提高生產線的產能。










